[VIP第1年] 指数:3
[VIP第1年] 指数:3
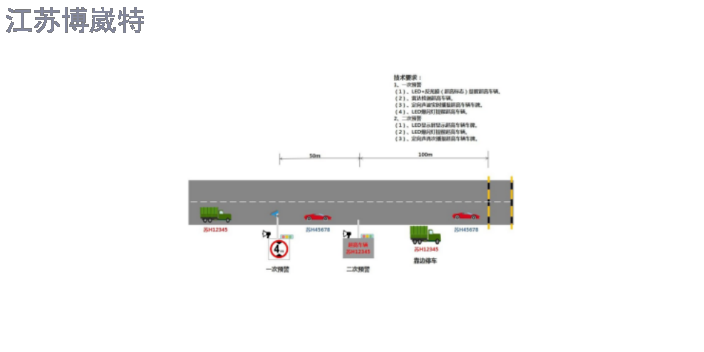
车载式智能防撞主动预警系统由智能预警主机和预警副机组成,主机既可单独的使用,也可与副机配套使用。系统可实时准确检测并跟踪作业车辆所在车道上游300m范围的车辆,当有车辆进入作业车辆所在车道上游200m范围且速度大于60km/h或压线、S型行驶等可能威胁作业车辆安全时,主机即实时向上述车辆发出有效定向声波预警,及时提醒上游车辆司机注意安全、变道行驶。当车辆未变道并进入作业车辆上游所在车道50米范围且相对速度≧35Km/h时,主机即向上游车辆发出更强定向声波预警,同时向作业现场发出预警信号,启动副机(磁吸式预警副机、手环式预警副机)提醒作业人员及时避让。淮安智能防撞防闯入主动预警系统——江苏博崴特电子科技有限责任公司。盐城交通安全防撞系统

汽车防撞预警系统主要是用于协助驾驶员避免高、低速追尾,行驶时无意识偏离车道,与行人碰撞等重大交通事故。它就像眼睛一样帮助驾驶员,持续不断的监测车辆前方道路状况,系统可以识别判断各种潜在的危险情况,并通过不同的声音和视觉提醒,以帮助驾驶员避免或减缓碰撞事故。汽车智能防撞系统大致的意思为:当汽车与汽车之间的间距小于设定的安全距离时,该系统能自动报警,并采取制动措施。汽车防撞预警系统是基于智能视频分析处理的汽车防撞预警系统,通过动态视频摄像技术、计算机图像处理技术来实现其预警功能。主要功能为:车距监测及追尾预警、前方碰撞预警、车道偏离预警、导航功能、黑匣子功能。相对于国内外现有的汽车防撞预警系统,如超声波防撞预警系统、雷达防撞预警系统、激光防撞预警系统、红外线防撞预警系统等,功能、稳定性、准确性、人性化、价格上都具有无可比拟的优势。可全天候、长时间稳定运行,极大提高了汽车驾驶的舒适性和安全性。目前市场上可以测定汽车之间安全距离的渠道有三种:超声波测距、微波雷达测距以及激光测距。商洛特种车辆防撞系统“路宁宝”为道路养护、事故处置、路政巡查和清排障作业增添了一道新型可靠的“安全防护墙”。

“交通事故(TrafficAccident)”是指车辆在道路上因过错或者意外造成人身伤亡或者财产损失的事件。交通事故不但是由不特定的人员违反道路交通安全法规造成的;也可以是由于地震、台风、山洪、雷击等不可抗拒的自然灾害造成。按照我国相关法律的规定,道路交通事故,是指车辆在道路上的行驶途中因过错或者意外造成的人身伤亡或者财产损失的事件。构成交通事故应当具备下列要素:(1)必须是车辆造成的。车辆包括机动车和非机动车,没有车辆就不能构成交通事故,例如行人与行人在行进中发生碰撞的就不构成交通事故;(2)是在道路上发生的。道路是指公路、城市道路和虽在单位管辖范围但允许社会机动车通行的地方,包括广场、公共停车场等用于公众通行的场所;(3)在运动中发生。是指车辆在行驶或停放过程中发生的事件,若车辆处于完全停止状态,行人主动去碰撞车辆或乘车人上下车的过程中发生的挤、摔、伤亡的事故,则不属于交通事故;(4)有事态发生。是指有碰撞、碾压、刮擦、翻车、坠车、失火等其中的一种现象发生;(5)必须有损害后果的发生。损害后果只包括直接的损害后果,且是物质损失,包括人身伤亡和财产损失;
目前市场上可以测定汽车之间安全距离的渠道有三种:超声波测距、微波雷达测距以及激光测距。超声波测距是利用超声波的反射特性测距。超声波发生器不断地发射出4OkHz超声波,该超声波遇到故障物后反射形成反射波,超声波接收器接收到反射波信号后,将其转换成电信号,从而测出目标的距离。微波雷达测距是利用从目标处反射回来的电磁波发现目标并测定其位置。激光测距的工作原理与微波雷达测距相似,具体的测距方式有连续波和脉冲波两种。智能预警主机即实时向上述车辆发出有效定向声波预警,及时提醒上游车辆司机注意安全、变道行驶。

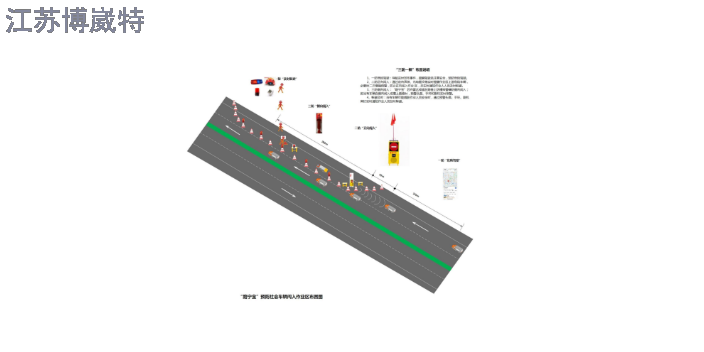
防闯入主动预警系统由智能预警主机和预警副机组成,主机既可单独的使用,也可与副机配套使用。系统可实时准确检测并跟踪作业现场所在车道上游300m范围的车辆,当有车辆进入作业过渡区所在车道上游200m范围,且速度大于60Km/h或压线、S型行驶等可能威胁作业现场人员人身安全时,主机即实时向上述车辆发出有效定向声波预警,及时提醒上游车辆司机注意安全、变道行驶。当车辆未变道并进入作业过渡区上游50米范围,且速度≧35Km/h时,主机即向上游车辆发出更强定向声波预警,同时向作业现场发出预警信号,启动副机(磁吸式预警副机、手环式预警副机)提醒作业现场人员及时避让。智能雷达防撞(防闯入)预警技术是把自己“武装”起来,不让本车道的危险物靠近自己。汕尾工程机械车辆防撞系统
智能防撞主动预警装置主要安装在路政巡查车、养护施工作业的防撞车、清扫车、双排座、皮卡等车辆后部。盐城交通安全防撞系统
感知融合层智能网联道路的感知融合层分为各传感器原始数据接入、数据融合、基于人工智能和机器学习的多目标检测与跟踪等。通过将不同类型的传感器数据整合在一起,包括摄像头、激光雷达、毫米波雷达等,以获取更全方面和准确的环境感知信息。将来自不同传感器的数据进行融合,采用融合算法来生成更为综合、可靠的环境感知结果。使用机器学习和深度学习技术,对感知数据进行实时分析和学习,以改善对复杂交通状况的理解和预测,提高系统的智能化水平。利用计算机视觉技术,实时识别和跟踪道路上的车辆、行人、自行车等目标,提供准确的位置和运动信息。盐城交通安全防撞系统
文章来源地址: http://aqfh.m.chanpin818.com/jtaqsssb/fzssiv/deta_23794381.html
免责声明: 本页面所展现的信息及其他相关推荐信息,均来源于其对应的用户,本网对此不承担任何保证责任。如涉及作品内容、 版权和其他问题,请及时与本网联系,我们将核实后进行删除,本网站对此声明具有最终解释权。